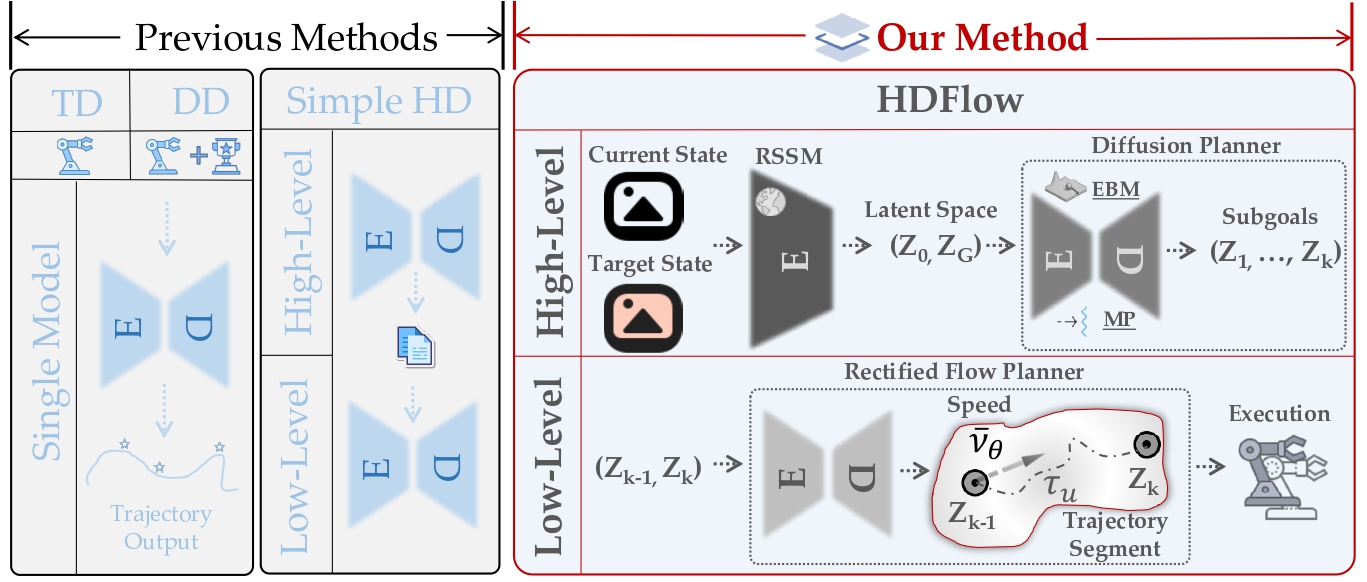
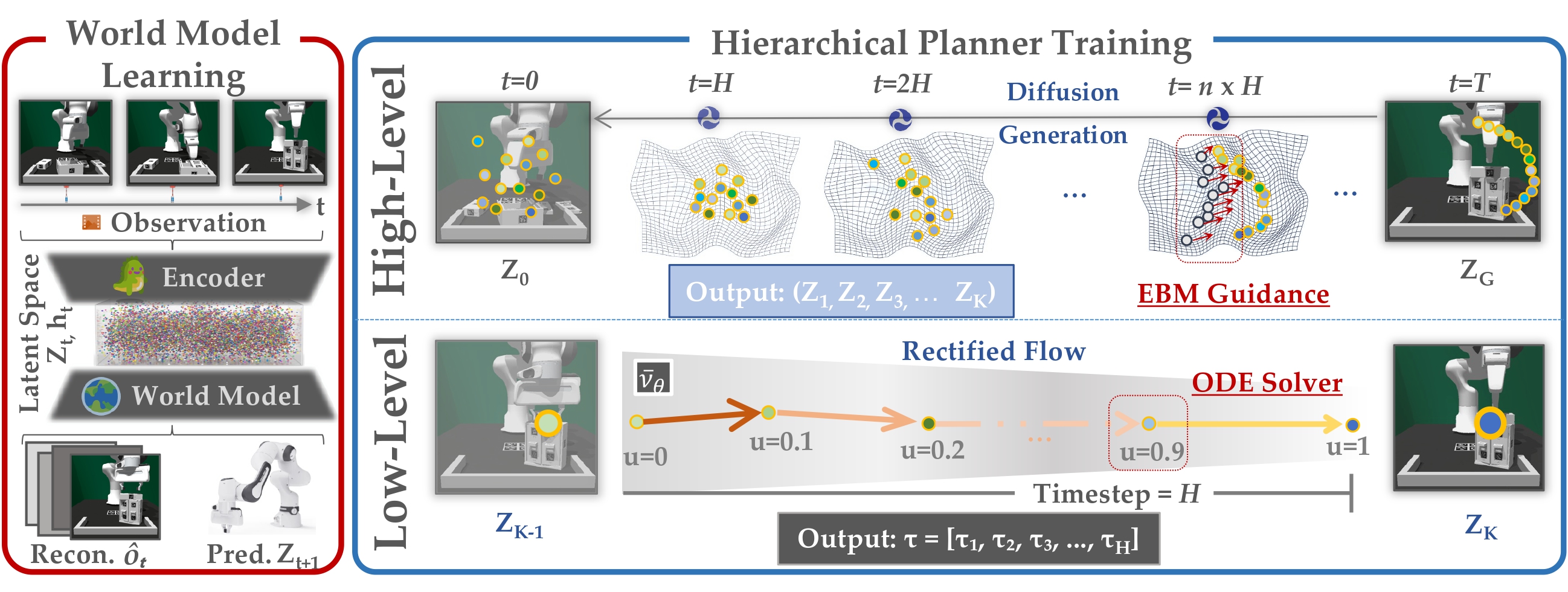
Long-horizon manipulation tasks represent a significant challenge in robotics, demanding both strategic, high-level reasoning and fast, precise, low-level control. While recent advances in generative models have shown promise in generating behavior plans for long-horizon tasks, they often lack a principled framework for hierarchical decomposition and struggle with the computational demands of real-time execution, due to their iterative denoising process. In this work, we introduce Hierarchical Diffusion-Flow (HDFlow), a novel hierarchical planning framework that optimally leverages the strengths of diffusion and rectified flow models. HDFlow employs a high-level diffusion planner to generate sequences of strategic subgoals in a learned latent space, capitalizing on diffusion's powerful exploratory capabilities. These subgoals then guide a low-level rectified flow planner that generates smooth and dense trajectories, exploiting the speed and efficiency of ordinary differential equation (ODE)-based trajectory generation. This hybrid approach synergistically combines the strengths of both models to overcome the limitations of single-paradigm generative planners, enabling robust and efficient long-horizon planning. We evaluate HDFlow on four challenging furniture assembly tasks in both simulation and real-world, where it significantly outperforms state-of-the-art methods.